Vous pouvez télécharger ce cours au format pdf : Télécharger
Chapitre 1
Rappels cinématiques et définition du coefficient d’adhérence
Dans ce chapitre, on s’attache à rappeler quelques formules de base en cinématique et à définir le coefficient d’adhérence des pneus au sol, ce qui doit permettre d’évaluer la force de traction maximum applicable au robot sans glissement.
On définit également un mode opératoire qui permet de mesurer ce coefficient grâce à une manipulation inédite.
Rappels de cinématique
| Solide en translation suivant un axe | Solide en rotation autour d’un axe |
| abscisse du déplacement: x vitesse linéaire: v accélération linéaire: γ(gamma) |
angle de rotation: Θ vitesse angulaire: ω accélération angulaire: acc_rot |
| v = dx/dt (m/s) γ = dv/dt = d ²x/dt² (m/s ²) |
Θ (rd) ω = dΘ/dt (rd/s) acc_rot = dω/dt =d²Θ/dt ² (rd/s²) |
| Relation fondamentale de la mécanique | |
| F = m.γ F: somme des forces appliquées m: masse du solide γ : accélération du solide |
C = J . acc_rot C: somme des couples appliqués J : moment d’inertie autour de l’axe acc_rot: accélération angulaire |
A propos du coefficient d’adhérence Ka
Et oui, le coefficient d’adhérence peut dépasser la limite théorique de 1. La force de traction peut dépasser dans ce cas la force verticale qu’exerce le robot sur son essieu moteur.
Lorsqu’un pilote de F1 freine à 4g (décélération de 40m/s²), si on néglige l’appui aérodynamique, ça correspond à ka=4 environ, et si on suppose un appui aérodynamique égal au poids de la monoplace, ça fait tout de même ka=2.
Pour un véhicule de tourisme, la moyenne pour le coefficient d’adhérence sur sol sec tourne autour de 1 et descend à 0.7 (voir moins) sur sol mouillé.
Pour un robot Eurobot, tout dépend du type de pneu utilisé et de l’état du terrain.
On peut imaginer une solution extrême avec un pneu constitué d’un simple joint torique ou ka peut descendre à une valeur inférieure à 0.5. A l’inverse un pneu caoutchouc de degré shore faible (de l’ordre de 20 à 30) doit pouvoir dépasser la limite théorique de 1.
Il est possible de mesurer la valeur de ce coefficient, comme va le prouver la manip présentée à la page suivante et qui est réalisée à l’occasion de la rédaction de ce document.
Cette manip relève de la plus haute technologie car elle nécessite l’usage du matériel suivant:
un pèse-bébé
une ficelle
une poulie
un seau
La difficulté est d’ordre mécanique car il faut bloquer mécaniquement les roues par rapport au châssis (Ce qui ne pose pas de problème si le robot possède le frein à main☺)
Détermination du coefficient d’adhérence par la méthode du seau suspendu
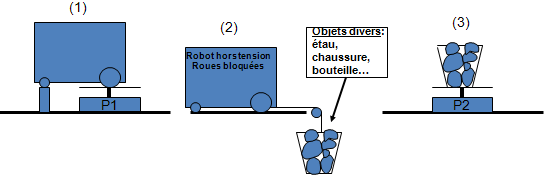
(1) On pose l’essieu sur le pèse-bébé et on maintient le robot à l’horizontale grâce à une cale:
On mesure P1, force d’appui des 2 roues sur le sol.
(2) On charge le seau jusqu’au début d’apparition du phénomène de patinage des roues. (La ficelle doit être attachée au robot le plus bas possible)
(3) On pèse le seau avec sa charge:
On mesure P2. ( force de traction maximum en limite de patinage)
On en déduit Ka=P2/P1
Résultats:
Le robot a été allégé puis chargé, ce qui a permis d’effectuer 2 mesures de ka:
Robot allégé: P1=7.55 kg P2= 7.90 kg ka=1.04
Robot chargé P1=14.65 kg P2=13.5 kg ka= 0.92
Normalement ka est indépendant du poids du robot. Ce n’est pas tout à fait vrai dans la manip mais il faut mettre ça sur le dos des erreurs de mesure à +-1chaussure près.
On peut retenir l’ordre de grandeur de ka (environ ka=1 dans notre cas)
Quelques photos pour se détendre.
Pesée du robot version allégée

Pesée du robot version alourdie

On charge le seau jusqu’au glissement

Pesée de la charge

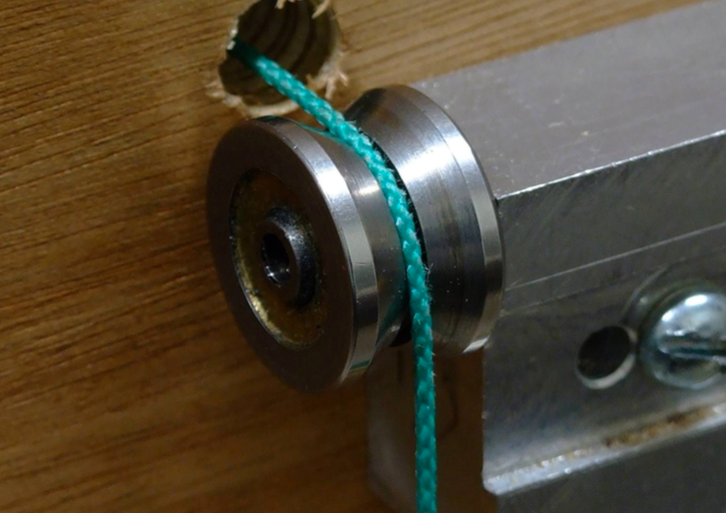
Un détail pour illustrer les sommets technologiques atteints par la méthode du seau suspendu
Avertissement sur la méthode du seau suspendu
Afin d’éviter un système mécanique pour le blocage des roues, certains pourraient être tentés d’asservir le robot sur consigne de position fixe.
Il faut avertir nos sympathiques lecteurs sur le danger de ce procédé en termes de durée de vie de leurs moteurs. En effet chaque moto réducteur sera placé dans la pire des situations qui consiste à maintenir par asservissement le robot à l’arrêt avec les roues à leur limite de glissement. C’est la que la puissance dissipée par effet joule est maximum et assez rapidement le rotor peut monter à des températures record jusqu’au passage en phase fumée noire.
Les risques sont d’autant plus importants que le moto réducteur est sous dimensionné en terme de couple, que le robot est lourd et que le coefficient d’adhérence des pneus est élevé.
On reparlera de ce problème d’échauffement aux chapitres 4 et 5