Vous pouvez télécharger ce cours au format pdf : Télécharger
Montée de tremplin sans terme intégral
La méthode extrêmement simple de mise en œuvre, s’inspire de la théorie du feedforward control dont on rappelle le principe.
Feedforward control :
Ce type de contrôle d’un processus permet en théorie de s’affranchir d’une perturbation quand celle-ci est connue et parfaitement modélisable. Il vient en complément d’un système qui possède déjà des retours classiques de type feedback.
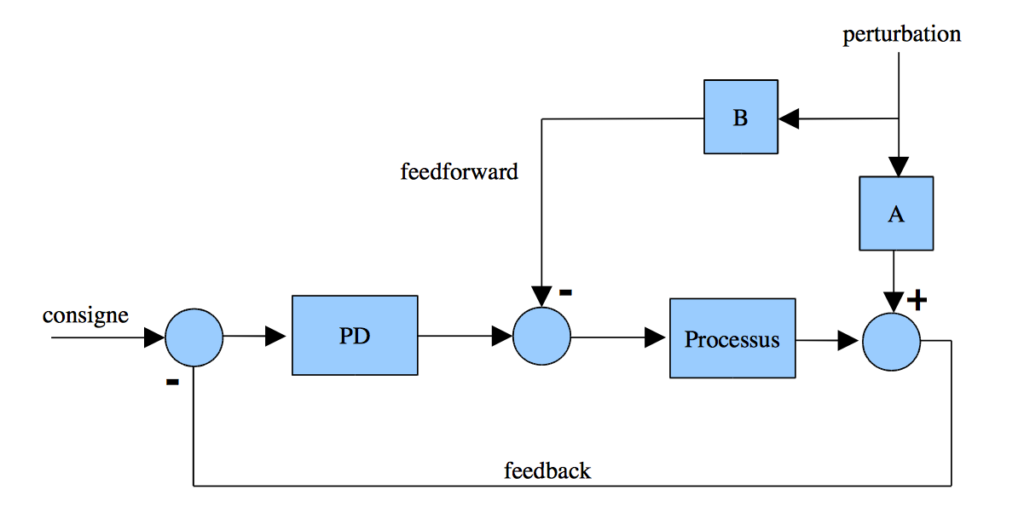
La méthode suppose qu’on sache modéliser l’influence de la perturbation sur le processus (Calcul de A) et déterminer la commande feedforward antagoniste correspondante (Calcul de B).
Dans le cas qui nous intéresse (Montée du tremplin), cette commande feedfordward va être déterminée expérimentalement.
Détermination de la commande feedforward :
On place le robot sur le tremplin à l’arrêt, asservi sur sa position et on relève les valeurs des 2 commandes appliquées sur les 2 moteurs. Normalement et par raison de symétrie, ces 2 valeurs sont égales et correspondent à l’effort fourni par les moteurs pour s’opposer à la perturbation (Force de gravité qui tend à tirer le robot vers le bas de la rampe).
Ces 2 valeurs représentent les valeurs feedforward qui doivent être retranchées aux commandes de roues.
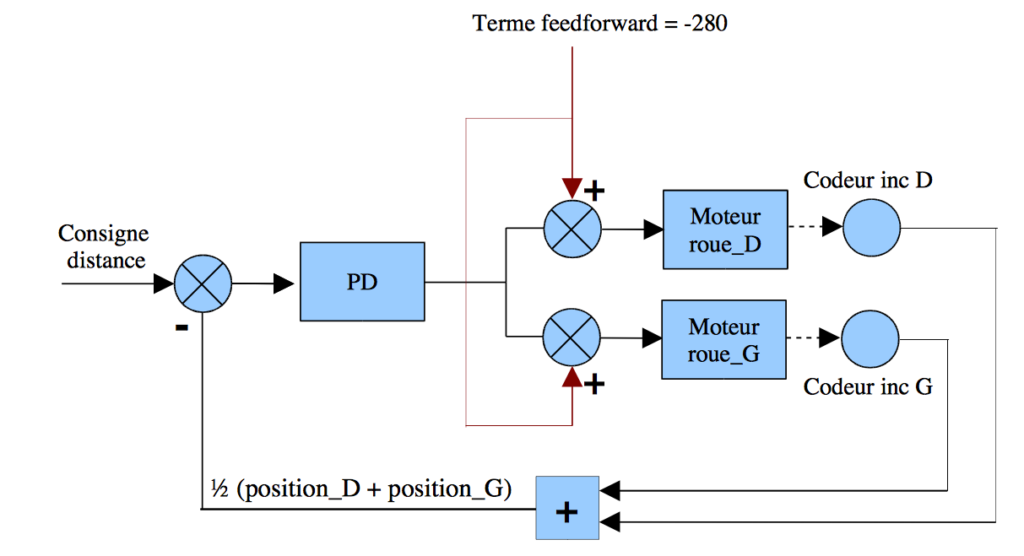
Exemple du robot RCVA :
Le robot grimpant la rampe en marche arrière, les 2 valeurs de la commande relevées expérimentalement sont négatives.
On trouve -280 (Pour une commande maximum correspondant à la saturation de
-2000, soit un effort pour les moteurs à 14% du plein effort).
La modification logicielle correspondant à l’ajout du terme feedforward tient en 2 lignes :
commande_roue_G = commande_roue_G -280 ;
commande_roue_D = commande_roue_D -280 ;
Normalement cette commande feedforward ne doit être appliquée que lorsque le robot est sur le tremplin. En pratique et pour simplifier encore le problème, on l’applique à partir du moment où le robot est à l’arrêt en bas du tremplin et s’apprête à le gravir.
Bien sûr, l’ascension doit se faire à vitesse constante soit à accélération nulle. Les moteurs n’ont par conséquent pas d’autre effort à produire que vaincre les forces de pesanteur qui tirent le robot vers le bas soit précisément des efforts égaux à -280 qui leurs sont offerts par les termes feedforward. Dans ces conditions l’asservissement est soulagé et l’écart de boucle devient négligeable soit une position égale à sa consigne durant l’ascension.